2.3 KiB
2.3 KiB
2连杆分析
参考:五连杆运动学解算与VMC
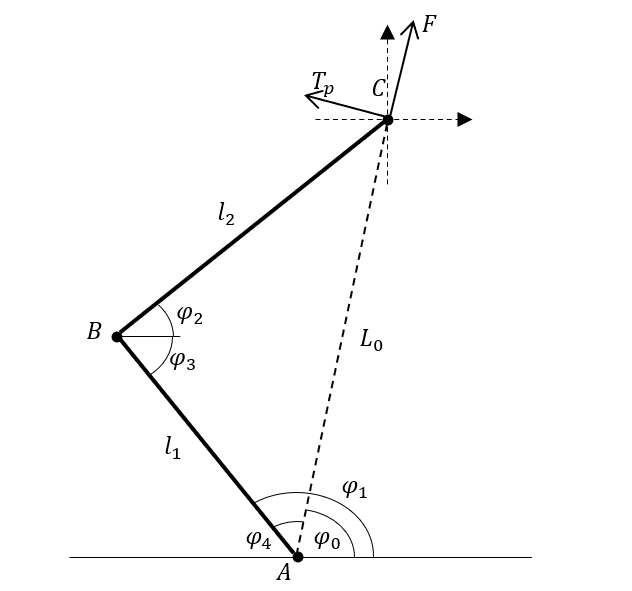
1 正运动学解算
$\phi_1$和$\phi_2$可由电机编码器测量得到。
$C$点坐标:
\left \{
\begin{array}{l}
x_C = l_1\cos\phi_1 + l_2\cos\phi_2\\
y_C = l_1\sin\phi_1 + l_2\sin\phi_2
\end{array}
\right .
得:
\left \{
\begin{array}{l}
L0 = \sqrt{x_C^2 + y_C^2} \\
\phi_0 = \arctan{\frac{y_C}{x_C}}
\end{array}
\right .
2 逆运动学解算
由余弦定理易得:
\phi_2+\phi_3 = \arccos\frac{l_1^2+l_2^2-L_0^2}{2l_1l_2}
又:
\phi_3 = \pi - \phi_1
得:
\phi_2 = \arccos\frac{l_1^2+l_2^2-L_0^2}{2l_1l_2}+\phi_1-\pi
3 雅可比矩阵
基于文中描述可得:
\left \{
\begin{array}{l}
\dot x_C = -l_1\dot\phi_1\sin\phi_1 - l_2\dot\phi_2\sin\phi_2\\
\dot y_C = l_1\dot\phi_1\cos\phi_1 + l_2\dot\phi_2\cos\phi_2
\end{array}
\right .
即:
\left [
\begin{matrix}
\dot x_C \\
\dot y_C
\end{matrix}
\right ]
=
\left [
\begin{matrix}
-l_1\sin\phi_1 & -l_2\sin\phi_2 \\
l_1\cos\phi_1 & l_2\cos\phi_2
\end{matrix}
\right ]
\left [
\begin{matrix}
\dot\phi_1 \\
\dot\phi_2
\end{matrix}
\right ]
记作:
\left [
\begin{matrix}
\dot x_C \\
\dot y_C
\end{matrix}
\right ]
=
J_0
\left [
\begin{matrix}
\dot\phi_1 \\
\dot\phi_2
\end{matrix}
\right ]
下面操作与文中相同,可得:
J^T = J_0^TRM =
\left[
\begin{matrix}
l_1 \,\sin \left(\phi_0 -\phi_1 \right) & \frac{l_1 \,\cos \left(\phi_0 -\phi_1 \right)}{L_0 }\\
l_2 \,\sin \left(\phi_0 -\phi_2 \right) & \frac{l_2 \,\cos \left(\phi_0 -\phi_2 \right)}{L_0 }
\end{matrix}
\right]
即:
J =
\left[
\begin{matrix}
l_1 \,\sin \left(\phi_0 -\phi_1 \right) & l_2 \,\sin \left(\phi_0 -\phi_2 \right)\\
\frac{l_1 \,\cos \left(\phi_0 -\phi_1 \right)}{L_0 } & \frac{l_2 \,\cos \left(\phi_0 -\phi_2 \right)}{L_0 }
\end{matrix}
\right]