是时候使用现代化的方式来进行嵌入式开发了!



![]()
![]()
![]()
![]()
[](https://gitee.com/x-robot/XRobot/stargazers) ## Doc 请阅读我们的[文档](https://xrobot-org.github.io),学习如何从驱动一个电机开始,搭建起完整的机器人系统。
是时候使用现代化的方式来进行嵌入式开发了!
![]()
![]()
![]()
![]()
[](https://gitee.com/x-robot/XRobot/stargazers) ## Doc 请阅读我们的[文档](https://xrobot-org.github.io),学习如何从驱动一个电机开始,搭建起完整的机器人系统。
 |
|  |
|  |
|

 |
| STM32F302CB | [IMU-DEV-BOARD](https://xrobot-org.github.io/1.hardware/3.IMU-DEV.html) |
|
| STM32F302CB | [IMU-DEV-BOARD](https://xrobot-org.github.io/1.hardware/3.IMU-DEV.html) | 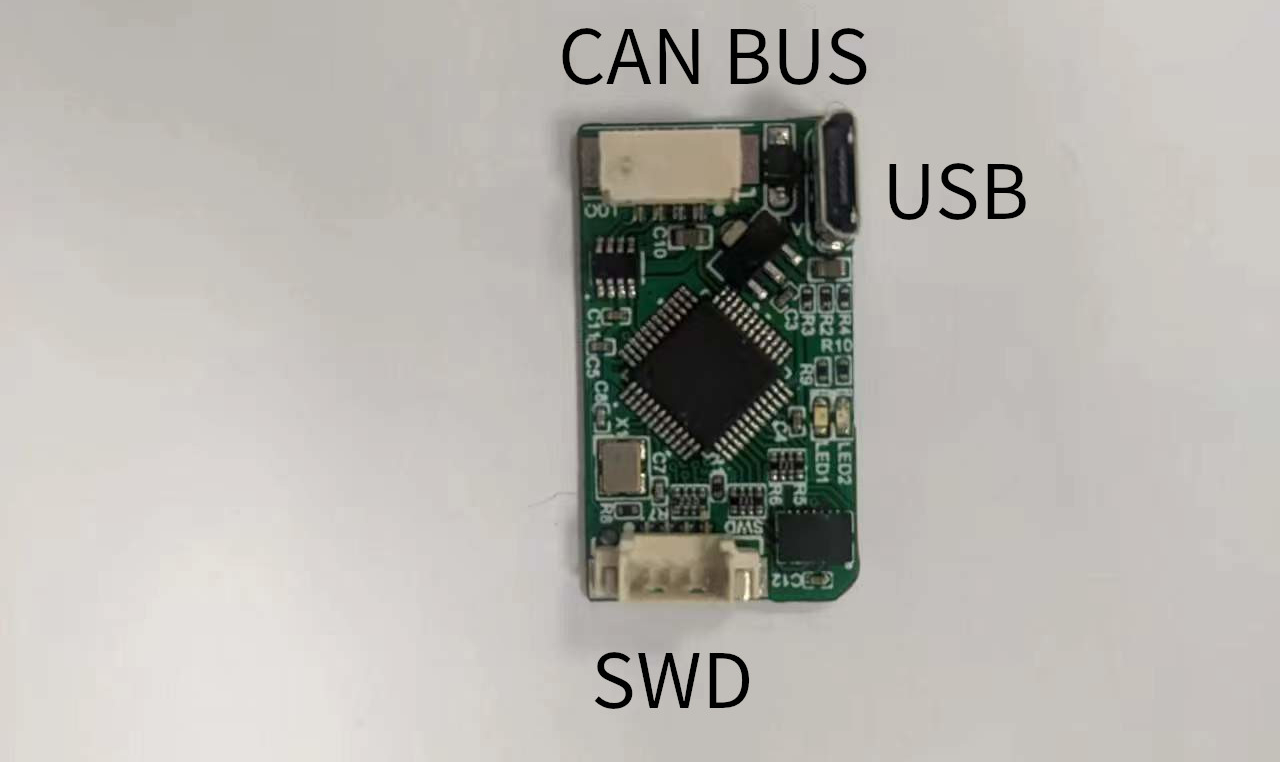 |
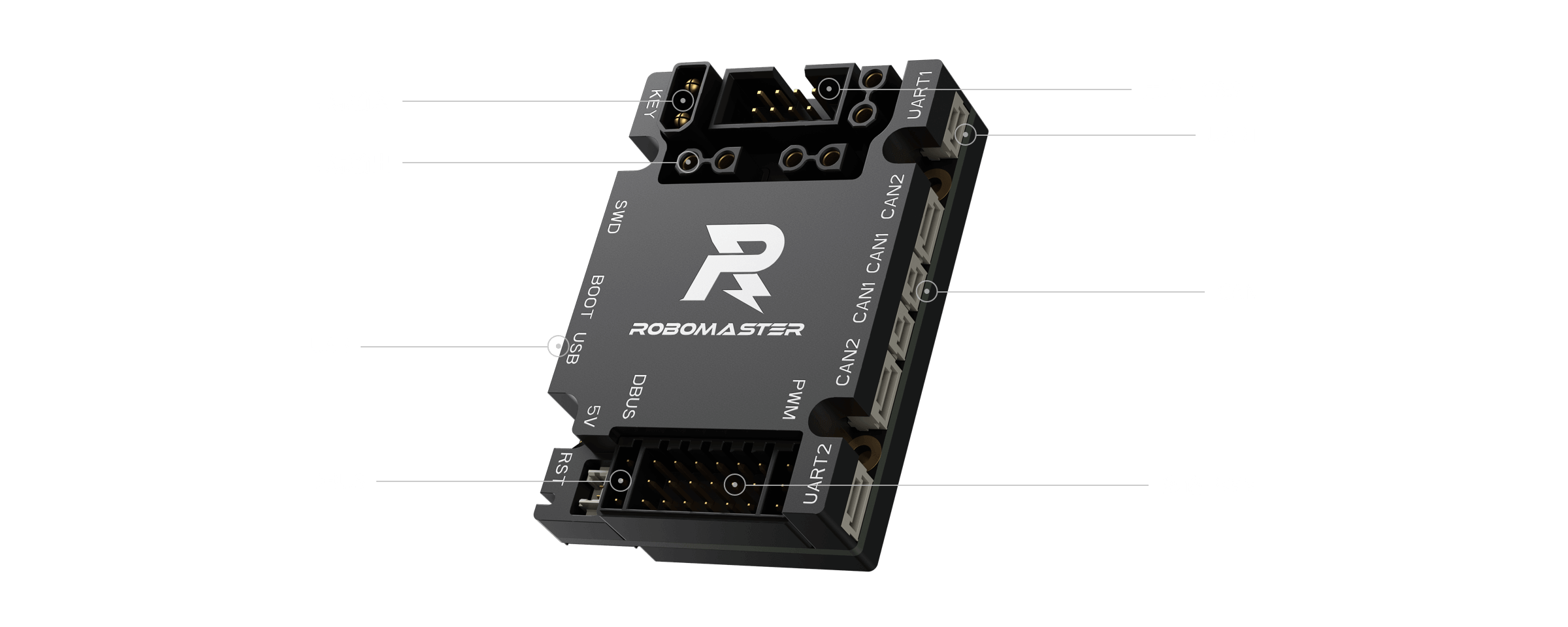
| STM32F446RE | [C-Mini](https://xrobot-org.github.io/1.hardware/1.C-MINI.html) |
|
| STM32F446RE | [C-Mini](https://xrobot-org.github.io/1.hardware/1.C-MINI.html) | 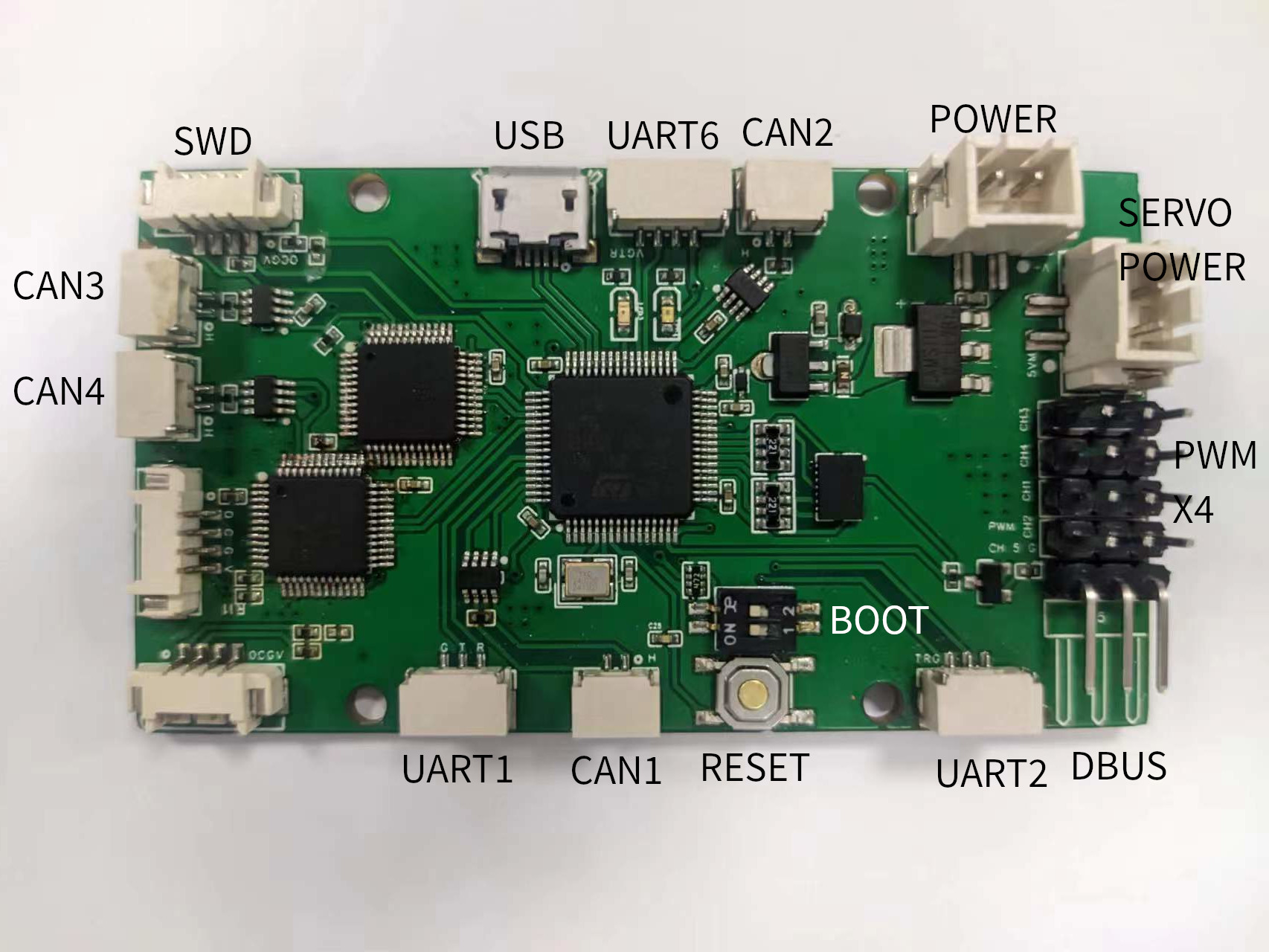 |
| STM32F103 | [F103 CAN](https://xrobot-org.github.io/1.hardware/4.F103_CAN.html) |
|
| STM32F103 | [F103 CAN](https://xrobot-org.github.io/1.hardware/4.F103_CAN.html) | 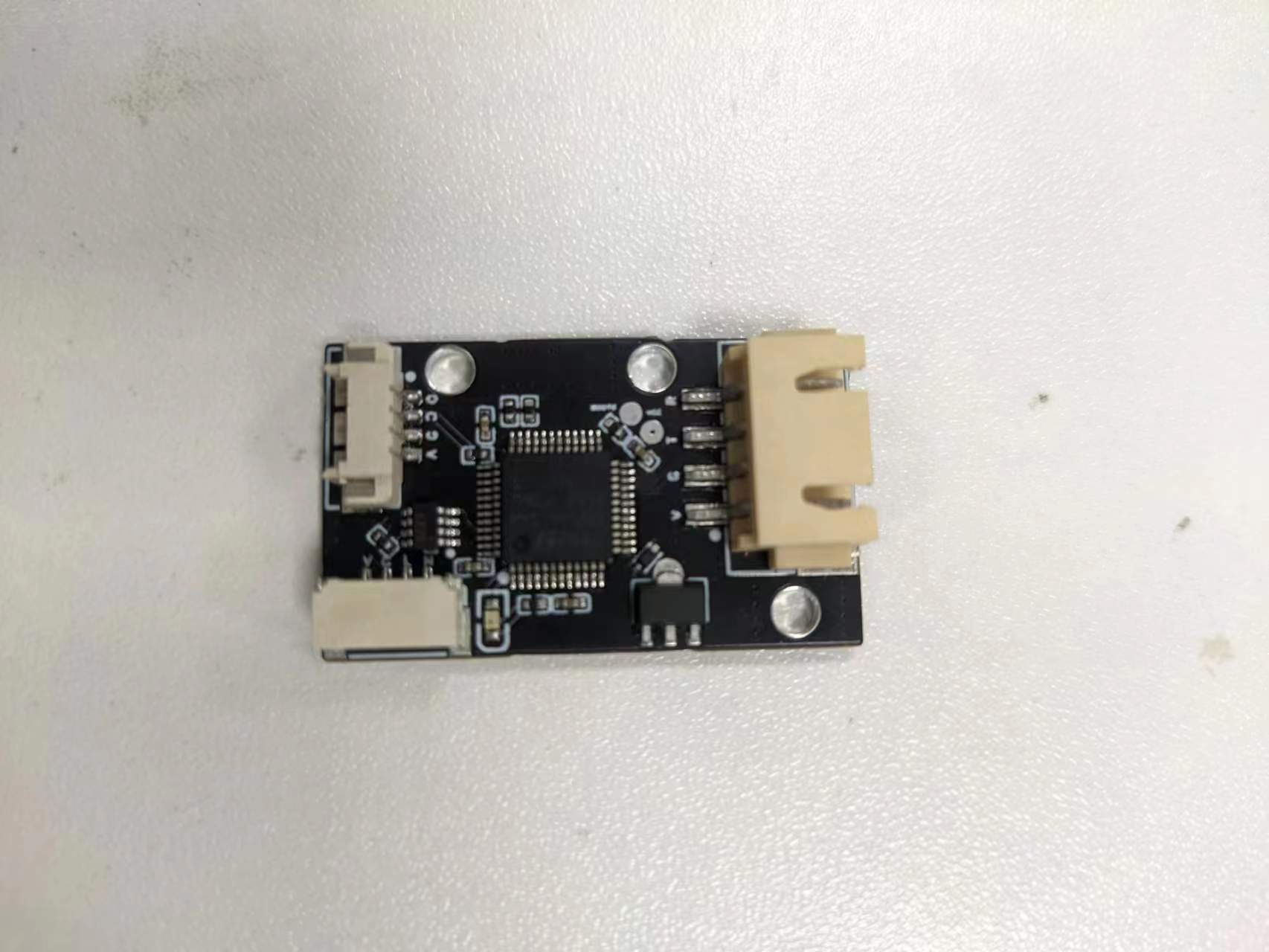 |
| ESP32-C3 | [ESP32C3-Core](https://xrobot-org.github.io/1.hardware/2.ESP32C3-Core.html) |
|
| ESP32-C3 | [ESP32C3-Core](https://xrobot-org.github.io/1.hardware/2.ESP32C3-Core.html) | 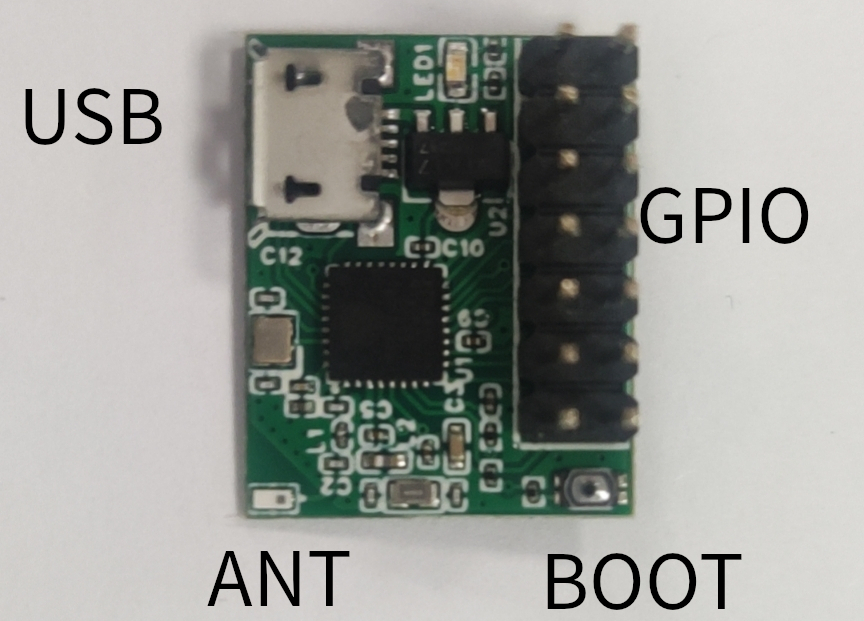 |
| Linux x86 | [Intel NUC](https://www.intel.cn/content/www/cn/zh/products/details/nuc.html) |
|
| Linux x86 | [Intel NUC](https://www.intel.cn/content/www/cn/zh/products/details/nuc.html) |  |
| Linux arm | [Raspberry pi 4B](https://www.raspberrypi.com/) |
|
| Linux arm | [Raspberry pi 4B](https://www.raspberrypi.com/) |  |
| Linux arm | [mCore-R818](https://mangopi.org/mcorer818) |
|
| Linux arm | [mCore-R818](https://mangopi.org/mcorer818) |  |
## 图片展示
`Linux下VSCode与openOCD联合调试`

`Windows使用Mingw64原生开发`

`Windows11使用CLion在WSL下开发`

`XRobot作为外部控制器在Webots进行运动学仿真`

`利用命令行查看log、校准陀螺仪、监控电机运行数据和机器人参数配置`

`自定义UI框架`

## 相关依赖
订阅发布/日志相关功能由[OneMessage](https://github.com/Jiu-xiao/OneMessage.git)提供: `一个基于发布-订阅模型的跨平台消息框架,纯C语言编写,性能和灵活性极高`
命令行/文件系统相关功能由[MiniShell](https://github.com/Jiu-xiao/mini_shell.git)提供: `无需操作系统与动态内存分配的嵌入式Shell`
Flash数据库由[MiniFlashDB](https://github.com/Jiu-xiao/MiniFlashDB.git)和[EasyFlash](https://github.com/armink/EasyFlash.git)提供。
|
## 图片展示
`Linux下VSCode与openOCD联合调试`

`Windows使用Mingw64原生开发`

`Windows11使用CLion在WSL下开发`

`XRobot作为外部控制器在Webots进行运动学仿真`

`利用命令行查看log、校准陀螺仪、监控电机运行数据和机器人参数配置`

`自定义UI框架`

## 相关依赖
订阅发布/日志相关功能由[OneMessage](https://github.com/Jiu-xiao/OneMessage.git)提供: `一个基于发布-订阅模型的跨平台消息框架,纯C语言编写,性能和灵活性极高`
命令行/文件系统相关功能由[MiniShell](https://github.com/Jiu-xiao/mini_shell.git)提供: `无需操作系统与动态内存分配的嵌入式Shell`
Flash数据库由[MiniFlashDB](https://github.com/Jiu-xiao/MiniFlashDB.git)和[EasyFlash](https://github.com/armink/EasyFlash.git)提供。